
Robot công nghiệp được sản xuất như thế nào?
Robot công nghiệp là các thiết bị cơ khí, ở một mức độ nhất định, tái tạo chuyển động của con người. Chúng được sử dụng bất cứ khi nào có nhu cầu giảm nguy hiểm cho con người, cung cấp thêm sức mạnh hoặc độ chính xác hơn so với con người, hoặc khi hoạt động liên tục được yêu cầu. Hầu hết các robot đều đứng yên, nhưng một số di chuyển khắp nơi làm việc cung cấp vật liệu và vật tư.
Nhiều người nghĩ rằng robot là quái vật hình người được nhìn thấy trong các bộ phim khoa học viễn tưởng và giả tưởng. Trong khi chúng ta có thể một ngày nào đó có khả năng kỹ thuật để sản xuất một cỗ máy như vậy, thì các robot ngày nay thực sự là những thiết bị khá đơn giản. Những chuyển động mà chúng ta coi là có lợi – ví dụ như nhặt một đồng xu từ bàn, là một điều khó khăn hơn cho một robot. Bộ não của chúng ta xử lý hàng nghìn bit dữ liệu biến đổi từ mắt để hướng dẫn cánh tay, cổ tay, bàn tay và ngón tay của chúng ta tiếp cận, nắm bắt và nhặt đồng xu. Ngay cả cảm giác xúc giác của đồng xu liên tục cập nhật bộ não của chúng tôi để cung cấp đủ áp lực ngón tay để nắm chặt tiền xu một cách an toàn. Bất kỳ sự thay đổi nào về vị trí đều được bù đắp dễ dàng trong bộ não của chúng ta. Để dễ dàng và hiệu quả khi lập trình một robot công nghiệp thực hiện cùng một nhiệm vụ, nhiều biến số phải bị hạn chế hoặc loại bỏ. Vị trí, tầm với, trọng lượng và nắm bắt nên duy trì nhất quán nhất có thể để các biến thể không dẫn đến mất hoặc bỏ đối tượng.
Máy tính điều khiển robot phải được lập trình bởi kỹ thuật viên, để “dạy” máy để hoàn thành chuyển động. Các lĩnh vực mà robot hoạt động tốt hơn con người là chính xác và lặp lại. Trong khi một số người có thể nhặt đồng xu với các chuyển động tương tự mỗi lần, robot có thể thực hiện thao tác với cùng một chuyển động mà không mệt mỏi. Nhiều robot có thể lặp lại chuyển động với độ chính xác vài nghìn inch và hoạt động 24 giờ mỗi ngày. Bởi vì công việc không mệt mỏi, chính xác này, rô bốt là một phân khúc mua sắm thiết bị công nghiệp ngày càng tăng. Hầu hết được sử dụng cho các hoạt động sơn và hàn lặp đi lặp lại, trong khi những người khác, được gọi là robot chọn và đặt, được sử dụng để nâng và đặt sản phẩm vào máy móc và bao bì.
Lịch sử
Người máy, hoặc “robot”, là một phân đoạn của khoa học tự động hóa rộng lớn hơn. Tự động hóa sử dụng máy móc và máy tính có thể tìm hiểu hoặc bù đắp cho các điều kiện hoạt động khác nhau. Thuật ngữ robot có thể được truy tìm từ robota của Séc, có nghĩa là lao động cưỡng bức. Thuật ngữ đầu tiên xuất hiện vào năm 1921 trong vở kịch “R.U.R.” (Robum Universal Robots) của nhà soạn kịch người Czech Karel Capek. Vở kịch mô tả robot hình người đã phá hủy các nhà sản xuất con người của họ – nhiều âm mưu tương tự của một số phim kinh dị khoa học viễn tưởng hiện đại.
Robot thực tế lần đầu tiên được thử sau khi phát triển máy tính. Vào cuối những năm 1960, Viện nghiên cứu Stanford đã thiết kế và chế tạo một robot thử nghiệm có tên là “SHAKEY”. Sử dụng máy ảnh truyền hình và máy tính, máy này có khả năng di chuyển và sắp xếp các khối thành các ngăn xếp. General Motors tài trợ một chương trình tại Viện Công nghệ Massachusetts vào giữa những năm 1970 để phát triển một robot tự động cho các mục đích lắp ráp. Ở đây, nhà nghiên cứu Victor Scheinman đã phát minh ra PUMA (bộ điều khiển phổ biến có thể lập trình để lắp ráp), và việc đưa robot vào ngành công nghiệp Mỹ bắt đầu.
Nguyên liệu thô
Robot chủ yếu được chế tạo bằng vật liệu thông dụng. Một số robot chuyên dụng cho các ứng dụng phòng sạch, chương trình không gian, hoặc các dự án “công nghệ cao” khác có thể sử dụng kim loại titan và các vật liệu tổng hợp cấu trúc của sợi carbon. Môi trường hoạt động và sức bền yêu cầu là những yếu tố chính trong việc lựa chọn vật liệu.
Thép, gang và nhôm thường được sử dụng nhất cho cánh tay và phần đế của robot. Nếu robot là di động, họ thường trang bị cho chúng lốp cao su để hoạt động yên tĩnh và độ bám trên sàn. Robot có đáng kể các thiết bị điện tử và hệ thống dây điện, và một số được điều khiển bằng radio hoặc laser . Xi lanh và các cơ chế tạo chuyển động khác có chứa dầu thủy lực hoặc khí nén. Ống silicone, cao su và thép không gỉ kết nối các cơ cấu với van điều khiển của chúng.
Để bảo vệ robot khỏi môi trường, một số khu vực tiếp xúc được phủ bằng các tấm chắn cao su tổng hợp linh hoạt và ống xếp có thể gập lại được. Động cơ điện và encoder được mua từ các nhà cung cấp tự động cùng với bộ điều khiển hoặc “bộ não”. Bộ điều khiển được đặt trong tủ thép nằm gần khu vực làm việc của robot hoặc mang trên thân robot.
Quá trình Sản xuất
1.Thiết kế
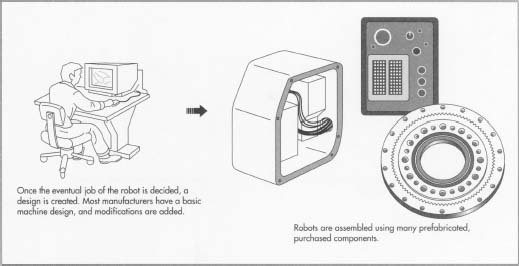
Mỗi robot bắt đầu với giai đoạn thiết kế. Những yếu tố này và các yếu tố khác phải được tính toán trong thiết kế: công việc sẽ được thực hiện; tốc độ hoạt động; môi trường hoạt động; các vật liệu nguy hiểm có liên quan; chiều dài tầm với; quảng đường di chuyển; biến quy trình; sự tham gia của con người; khả năng điều khiển; và khả năng xảy ra lỗi.
Hầu hết các nhà sản xuất đều có một thiết kế máy cơ bản mà họ kết hợp các sửa đổi và phụ kiện để đáp ứng các yêu cầu cụ thể của ứng dụng.
Hầu hết các nhà sản xuất đều có một thiết kế máy cơ bản mà họ kết hợp các sửa đổi và phụ kiện để đáp ứng các yêu cầu cụ thể của ứng dụng.
 Robot đầu tiên được cài đặt trong ngành công nghiệp Mỹ, Uni “pick-and-place” uni này lần đầu tiên loại bỏ các bộ phận kim loại nóng từ một máy đúc tại một nhà máy GM ở Trenton, New Jersey, vào năm 1961.
Robot đầu tiên được cài đặt trong ngành công nghiệp Mỹ, Uni “pick-and-place” uni này lần đầu tiên loại bỏ các bộ phận kim loại nóng từ một máy đúc tại một nhà máy GM ở Trenton, New Jersey, vào năm 1961.
Robot, giống như bất kỳ công cụ nào, chỉ tốt như những người tạo ra chúng. Chúng không thể làm công việc mà họ không được thiết kế hoặc lập trình để làm. Chúng hiệu quả nhất khi toàn bộ hệ thống và quy trình được lên kế hoạch cẩn thận. Ngoài ra, công nhân chịu trách nhiệm cho chúng cũng phải được đào tạo và đào tạo đầy đủ.
Trong những năm 1980, Tổng công ty General Motors đã chi tới 40 tỷ đô la cho các công nghệ mới, hàng trăm triệu cho robot. Thật không may, công ty đã không chi tiêu gần như đủ để hiểu các hệ thống và quy trình mà các robot được cho là phải cách mạng hóa hoặc trên những người đã duy trì và vận hành chúng. Nhà máy GM ở Hamtramck, Michigan, được thử nghiệm. Thay vào đó, vào năm 1988 nó là nơi của một số tồi tệ nhất trong công nghệ không tưởng. Robot trên đường đôi khi vẽ nhau thay vì thân xe đi qua; robot thỉnh thoảng đã mất kiểm soát và đập vào các phương tiện đi qua; một robot được thiết kế để cài đặt kính chắn gió đã được tìm thấy một cách hệ thống đập chúng. Một lần, khi một robot ngừng hoạt động, các kỹ thuật viên không biết cách sửa chữa nó. Một cuộc gọi vội vã đến nhà sản xuất đã mang một kỹ thuật viên lên chiếc máy bay tiếp theo. Anh nhìn vào con robot, nhấn nút “Reset”, và máy lại hoạt động trở lại.
William S. Pretzer
2. Lên kết cấu
Sau khi được thiết kế, phần đế, cánh tay, thân và giá đở được chế tạo. Phần đế Robot công nghiệp thường nặng, để đảm bảo chống lật. Nó được làm bằng cách đúc hoặc hàn, sau đó gia công. Nhiều nhà sản xuất robot sử dụng rô-bốt để hàn các bộ phận cho các robot mới.
Những khu vực còn lại của robot được gia công với điều khiển ở khoảng cách ngắn để đảm bảo phù hợp và hoạt động phù hợp của các thành phần gắn. Tương tự như vậy, cột chính và cánh tay được xây dựng để phù hợp chính xác vào lắp ráp cuối cùng.
Robot được lắp ráp bằng cách sử dụng một lượng đáng kể các thành phần đã mua như động cơ điện, xi lanh thủy lực, vòng bi, dây dẫn, bộ điều khiển và các bộ phận quan trọng khác. Một robot công nghiệp có thể chứa 2.000 bộ phận riêng lẻ và được lắp ráp bởi các đội cho tới khi sàng để thử nghiệm và hoàn thiện.
3. Lắp ráp
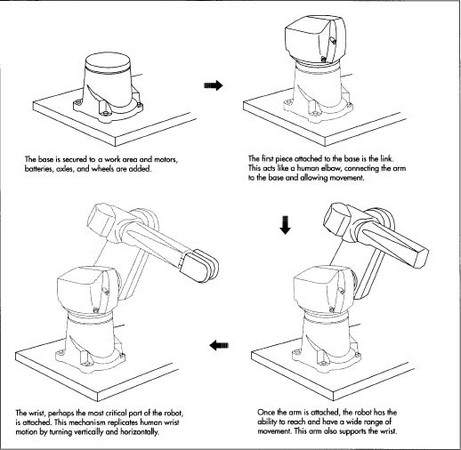
Để bắt đầu quá trình lắp ráp, robot di động đầu tiên có động cơ kéo, pin, trục, bánh xe và lốp được gắn. Robot văn phòng không yêu cầu những vật dụng này. Chúng được tạm thời bắt vít vào sàn để ổn định trong quá trình lắp ráp. Các cột và cánh tay đang di chuyển được lắp ráp lại với động cơ truyền động tương ứng của chúng và sau đó được gắn vào đế. Phần đế có một vòng bánh đó là động cơ xoay để cung cấp chuyển động quay. Nó phải gắn chặt với các thiết bị truyền động chứa trong cột. Vòng bi lực đẩy hỗ trợ trọng lượng của cột và cánh tay trên đế. Một encoder bao quanh vòng bi và cung cấp phản hồi vị trí điện tử cho bộ điều khiển.
3.1 Khâu liên kết ( lắp ráp)
Phần tiếp theo là khâu liên kết. Nó hoạt động như một khuỷu tay, và kết nối cánh tay với đế . Một bộ ổn định hỗ trợ cung cấp điều khiển vị trí cho khâu liên kết, cho phép nó di chuyển trong một đường dẫn định trước. Các thành phần này chứa các giá đỡ ổ trục mà các trục xoay được bắt vít. Mỗi ổ đỡ được sơ bộ hoặc được cung cấp với một đường bôi trơn hoặc khớp nối. Liên kết chứa một cảm biến vị trí cung cấp tín hiệu vị trí khác cho bộ điều khiển.
3.2 Cánh tay
cánh tay được lắp ráp vào phần thẳng đứng của liên kết. Nó cung cấp hầu hết “tiếp cận” với robot và hỗ trợ cổ tay. Cánh tay chứa các trục truyền động vận hành cổ tay. Ba động cơ, hoặc một sự kết hợp của động cơ và xi lanh thủy lực kết nối với trục truyền động. Từ chỗ cánh tay và khâu liên kết phải chịu được toàn bộ tải trọng của cổ tay, điều này được thực hiện với vòng bi lớn và một chốt trụ lớn
3.3 Cổ tay
Cổ tay là cơ chế quan trọng của robot. Đó là cổ tay mà hầu hết lặp lại chuyển động của con người bằng cách xoắn và quay để đặt súng sơn, thợ hàn, hoặc công cụ khác ở vị trí chính xác. Nhiều robot cũng có các thiết bị điện tử cảm biến tải trong cổ tay để báo hiệu khi bị kẹt hoặc khi tải quá nặng để đảm bảo an toàn. Cảm biến vị trí bổ sung và thiết bị điện tử điều khiển công cụ cũng được lắp ráp vào cánh tay và cổ tay.
4. Đấu dây cho bộ điều khiển
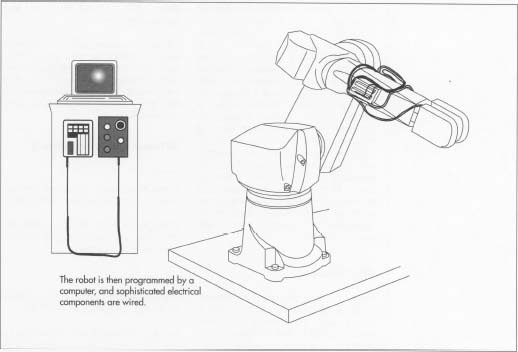
Một khi lắp ráp cơ khí đã được hoàn thành, hệ thống dây điện và hệ thống ống nước của robot có thể được hoàn thành. Tất cả các cảm biến của động cơ Robot công nghiệp và các thành phần điện phải có dây điện và mang thông tin trở lại máy tính điều khiển. Thỉnh thoảng, không gian không sử dụng trong cánh tay và cơ sở cung cấp một nơi thuận tiện để lắp một số thiết bị điện tử điều khiển, rút ngắn các đường dây dẫn điện. Xi lanh thủy lực và khí nén có ống mang áp lực để vận hành chúng, điều khiển từ các van trong phần đế. Hầu hết các dây và ống này được chuyển trở lại tủ điều khiển, cho robot di động, được gắn vào đế. Nếu robot là văn phòng , bộ điều khiển này thường được lắp đặt cách xa vài mét và được nối với nhau bằng jack. Sau khi lắp ráp, cánh tay và cột của robot đôi khi được bảo vệ bằng các tấm chắn và lá chắn để bảo vệ chúng khỏi phun sơn, tia lửa điện, hoặc các mối nguy hiểm khác trong môi trường.
5.Lắp đặt
Lắp đặt diễn ra tại xưởng người dùng. Robot được bảo đảm với sàn bằng bu lông. Nếu di chuyển, một dây dẫn được chôn xuống sàn để robot theo dõi từ nhiệm vụ này sang nhiệm vụ khác. Nó đi theo dây tín hiệu vô tuyến và cũng sử dụng dây để giao tiếp với bộ điều khiển trung tâm. Gần đây, laser đã được sử dụng để loại bỏ các dây. Robot được dẫn đường qua con đường của nó bằng một chùm tia laser phản chiếu trên tường. Một số thiết kế cũng kết hợp máy quay video. Các ứng dụng văn phòng phẩm thường yêu cầu hàng rào được xây dựng xung quanh robot nên một người không nghi ngờ không đi vào khu vực làm việc của robot và bị thương. Sau khi cài đặt, nhà sản xuất robot thường cung cấp đào tạo hoạt động và bảo trì cho khách hàng.
6. Kiểm soát chất lượng
Thử nghiệm bao gồm hai phần: độ chính xác chức năng và một quá trình được gọi là “đốt cháy”. Một khi robot lắp ráp được cấp năng lượng với nguồn điện, một chương trình máy tính chỉ thị cho bộ điều khiển di chuyển cánh tay robot thông qua một loạt các chuyển động. Các bản ghi chính xác của các chuyển động này được thực hiện, bất kỳ vấn đề nào được khắc phục. Sau đó, robot được đưa vào hoạt động liên tục trong vài giờ. Điều này được gọi là burn-in, và nó phục vụ hai chức năng. Đầu tiên, bất kỳ mất độ chính xác nào cũng có thể được phát hiện bằng cách sử dụng dữ liệu từ thử nghiệm chức năng. Ví dụ như vậy sẽ chỉ ra một vấn đề thiết kế, lắp ráp lỏng lẻo, mang lỗi hoặc tương tự. Thứ hai, chạy thử nghiệm mang điện tử và thủy lực lên đến nhiệt độ hoạt động. Điều này là quan trọng bởi vì bộ điều khiển được lập trình với các yếu tố hiệu chỉnh được gọi là bù đắp. Những bù đắp này bù lại phản hồi từ các cảm biến vị trí để cho phép biến đổi nhiệt độ của các bộ phận. Với máy được hâm nóng, lập trình viên có thể đặt các yếu tố hiệu chỉnh vào chương trình để mang lại hiệu suất tối ưu.
Tương lai
Robotics là một trong những phân khúc phát triển nhanh nhất của thị trường máy công nghiệp. Điều khiển chủ yếu bằng những tiến bộ trong công nghệ máy tính, các rô bốt cũ hơn nhanh chóng bị lỗi thời bởi các mẫu máy mới. Các công ty Nhật Bản đang dẫn đầu sự phát triển của robot, và nhiều thiết kế của họ kết hợp khoa học mới về trí thông minh nhân tạo cho phép robot tự học và tự điều chỉnh hoạt động của mình.
Những tiến bộ trong máy ảnh và tầm nhìn điện tử cũng sẽ tác động đến robot trong những năm 1990. Nhiều robot sẽ tham gia vào các lĩnh vực sử dụng mới như dịch vụ y tế và thực phẩm, điều này sẽ mang lại nhiều người tiếp xúc với chúng hơn trước đây ở nơi làm việc công nghiệp.