
Dự án IOT | Tự động hóa ngôi nhà: Điều khiển Web bằng Vi điều khiển PIC và Adafruit IO
Tự động hóa ngôi nhà luôn là nguồn cảm hứng cho các dự án cho hầu hết chúng ta. Và bây giờ trong kỷ nguyên của IoT , nhờ mô-đun ESP8266 giúp dễ dàng kiểm soát mọi thứ từ mọi nơi trên thế giới. Bạn có thể bật tắt thiết bị trong nhà mà không cần dụng tới công tắc.
Trong dự án dựa trên IoT này, chúng tôi đã kết nối ba đèn AC dưới dạng tải và chúng có thể được điều khiển từ xa bằng điện thoại hoặc máy tính.
Linh kiện cần thiết
- ESP8266
- Vi điều khiển PIC (PIC16f877A)
- Module rơle điện từ 12V 5A -1
- Nguồn điện 12 v (12V / 1A trở lên) -1
- Ổn áp LM7805 -1
- Bộ điều chỉnh LM317 -1
- Điện trở 10k ohm -1
- Điện trở 1k – 3
- Biến trở 10k – 1
- Biến trở 1k -1
- LCD 16×2
- Tụ 1000uF -1
- Tụ 10uF -2
- Dây dẫn
- Bộ dao động tinh thể 18.432 MHz -1
- LED -2
- Tụ 22pF -2
- BreadBoard hoặc PCB (tùy chọn)
Sơ đồ mạch

Trong dự án Tự động hóa ngôi nhà được điều khiển bằng Web , chúng tôi đã sử dụng vi điều khiển PIC16F877A để thực hiện tất cả các hoạt động. Nó sẽ giao tiếp với mô-đun Wi-Fi ESP8266 để gửi và nhận dữ liệu từ máy chủ Adafruit và thực hiện hành động tương ứng để BẬT / TẮT ro7le hoặc tải và hiển thị trạng thái tải qua LCD. Chúng tôi đã sử dụng màn hình LCD 16×2 để hiển thị trạng thái của các thiết bị AC được kết nối.
Trong dự án này, chúng tôi có ba nguồn cung cấp năng lượng:
- Vì chúng tôi đã sử dụng mô-đun rơle 12 v, chúng tôi cần nguồn 12 v, vì vậy chúng tôi đã sử dụng bộ chuyển đổi 12 v để cấp nguồn cho rơle.
- Chúng tôi cần 5v để cấp nguồn cho vi điều khiển PIC, LCD và một số mạch mô-đun khác. Vì vậy, chúng tôi đã sử dụng một bộ điều chỉnh điện áp 7805 kết nối với nguồn 12 v. Bộ điều chỉnh điện áp này cung cấp đầu ra 5v.
- Một bộ nguồn 3,3v được sử dụng để cung cấp năng lượng cho ESP8266 khi nó hoạt động trên 3.3v. Việc cung cấp này được thực hiện bằng cách sử dụng bộ điều chỉnh điện áp LM317 có thể được cấu hình thành 3,3v bằng cách sử dụng một số mạch phân chia điện áp.
Tất cả các kết nối cho dự án này đã được hiển thị trong sơ đồ mạch. Thiết lập cuối cùng sẽ như thế này:


Thiết lập Adfruit IO cho tự động hóa ngôi nhà
Trong dự án này, chúng tôi sẽ điều khiển một số thiết bị AC gia đình thông qua một trang web được đặt bằng Adafruit IO. Adafruit IO là một dịch vụ internet đơn giản dễ sử dụng, dễ dàng cho phép các thiết bị IoT nhận và gửi dữ liệu. Ngoài ra, nó có thể được sử dụng để tạo giao diện GUI để xem dữ liệu, điều khiển thiết bị và kích hoạt cảnh báo.
Theo các bước dưới đây để thiết lập Adafruit IO
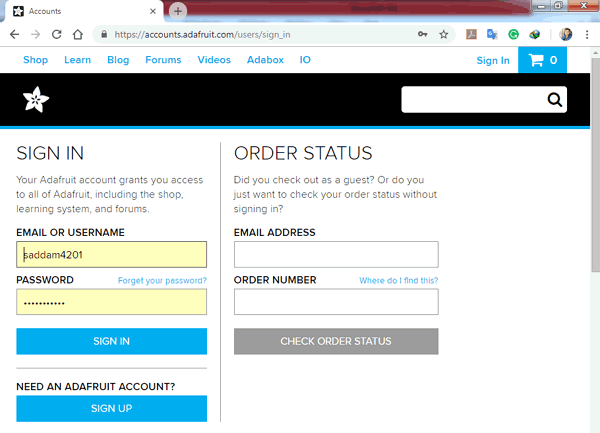
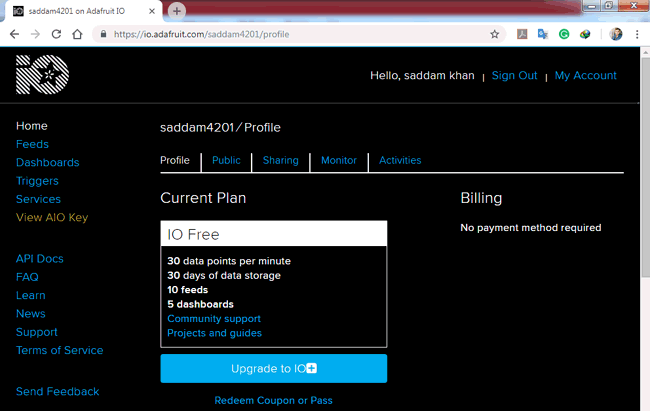
Bước 1: trong bước này, chúng tôi phải tạo một tài khoản trên adafruit.io hoặc nếu bạn đã có tài khoản chỉ cần đăng nhập vào đó.
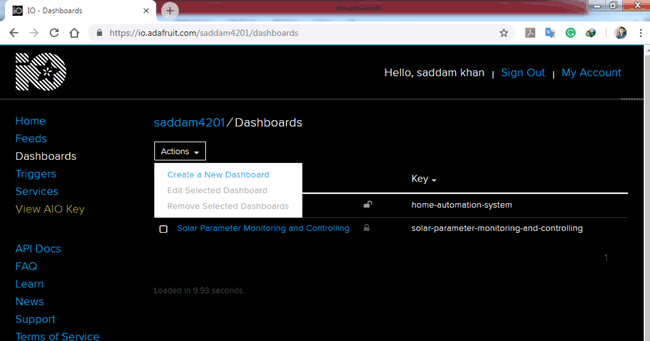
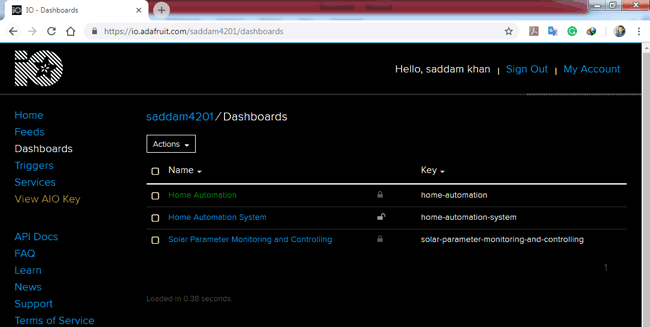
Bước 2: Tạo board điều khiển bằng cách nhấp vào ‘Dashboards’ ở bên trái của trang và sau đó nhấp vào ‘Action’ và sau đó vào ‘Create a New Dashboard’.
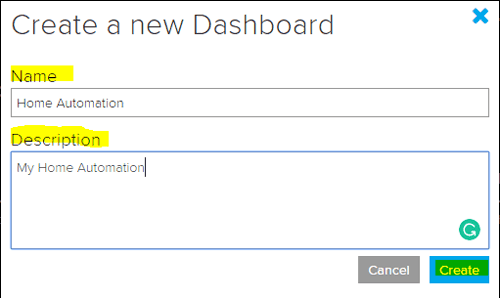
Bây giờ, một cửa sổ sẽ mở ra, điền vào bất kỳ tên nào như Tự động hóa ngôi nhà và nhấp vào Create . Bạn cũng có thể thêm một số mô tả liên quan đến dự án.
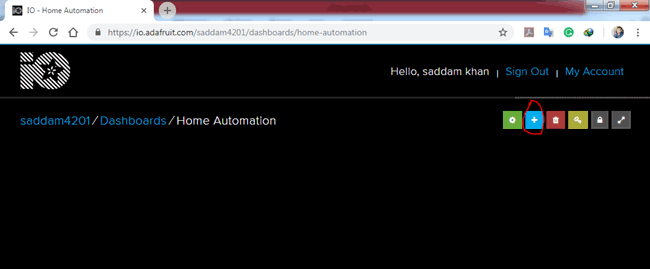
Bước 3: Bây giờ bấm vào newly created dashboard
Bây giờ chúng ta cần nhấp vào + size ở phía bên phải của trang có hình vuông màu xanh và hình tròn màu đỏ.
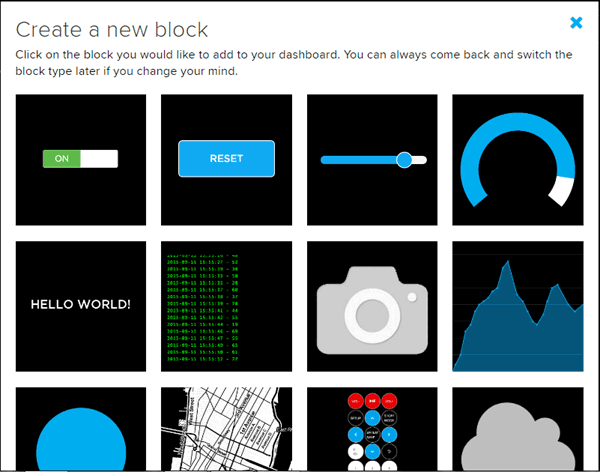
Bây giờ, một cửa sổ khác sẽ mở để chọn khối mới mong muốn như công tắc BẬT / TẮT.
Sau khi chọn Block (On/Off button, cửa sổ bật lên mới sẽ mở ra. Nhập vào đây tên của nguồn cấp dữ liệu mới của bạn như Light1 hoặc nhấp vào Create.

Bây giờ bấm vào một nguồn cấp dữ liệu mới được tạo và điền một số chi tiết và bấm vào create a block.
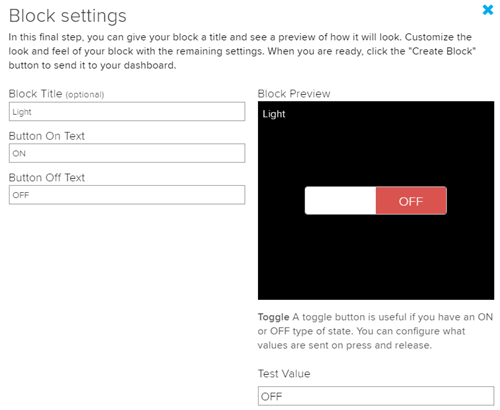
Bạn có thể tạo thêm nguồn cấp dữ liệu và khối theo yêu cầu. Ở đây chúng tôi đã tạo ra ba thanh để điều khiển ba đèn từ giao diện web này

Bước 4: Bây giờ bấm vào biểu tượng ‘KEY’ trên cùng một trang và sao chép tên người dùng và khóa hoạt động được cung cấp ở đó.
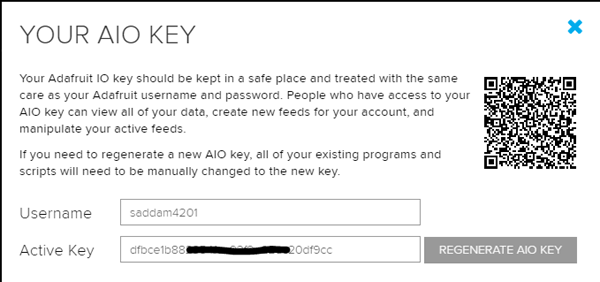
Bước 5: Bây giờ hãy mở code và thay thế tên người dùng bằng tên người dùng của bạn ở mọi nơi trong code, cũng thay thế MQTTPassword bằng khóa hoạt động trong code. Code hoàn chỉnh được đưa ra vào cuối dự án này.
const char MQTTHost[] = "io.adafruit.com"; const char MQTTPort[] = "1883"; const char MQTTClientID[] = "ABCDEF"; const char MQTTTopicRelay1[] = "saddam4201/feeds/Light1"; const char MQTTTopicRelay2[] = "saddam4201/feeds/Light2"; const char MQTTTopicRelay3[] = "saddam4201/feeds/Light3"; const char MQTTTopicRelay4[] = "saddam4201/feeds/Light4"; const char MQTTProtocolName[] = "MQTT"; const char MQTTLVL = 0x03; const char MQTTFlags = 0xC2; const unsigned int MQTTKeepAlive = 60; const char MQTTUsername[] = "saddam4201"; // put your Username const char MQTTPassword[] = "xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx"; // Put Your Password const char MQTTQOS = 0x00; const char MQTTPacketID = 0x0001;
Bước 6: Bây giờ biên dịch và tải code lên vi điều khiển PIC.
Giao thức MQTT
Dự án tự động hóa ngôi nhà dựa trên IoT này sử dụng giao thức MQTT để trao đổi dữ liệu giữa máy chủ và máy khách. Giao thức này rất nhanh so với giao thức TCP / IP. Và khái niệm làm việc cũng khác với giao thức TCP / IP. Giao thức này có ba linh kiện chính.
- Publish
- Broker
- Subscriber
Theo MQTT.org (trang web chính thức), MQTT là viết tắt của MQ Telemetry Transport. Nó là một giao thức xuất bản / đăng ký, giao thức nhắn tin cực kỳ đơn giản, được thiết kế cho các thiết bị bị hạn chế và các mạng băng thông thấp, delay cao hoặc không đáng tin cậy. Các nguyên tắc thiết kế là để giảm thiểu băng thông mạng và yêu cầu tài nguyên thiết bị đồng thời cũng cố gắng đảm bảo độ tin cậy và một số mức độ đảm bảo phân phối. Những nguyên tắc này để biến giao thức trở thành lý tưởng của M2M hoặc mạng Internet of Things của các thiết bị được kết nối và cho các ứng dụng di động có băng thông và chân ở mức cao.
Giải thích code
Phần lập trình của Adafruit.io này hơi khó khăn một chút vì giao thức MQTT và định dạng khung của nó. Nhưng nếu bạn không muốn đi sâu vào vấn đề này thì bạn có thể trực tiếp thử code được đưa ra ở cuối. Ở đây chúng tôi đã giải thích một số phần của code dưới đây:
Trước hết, thêm tất cả các thư viện cần thiết và thiết lập các bit cấu hình cho Vi điều khiển PIC .
#define _XTAL_FREQ 18432000 #include <xc.h> #include<pic.h> #include <stdio.h> #include <stdlib.h> #include <string.h> // BEGIN CONFIG #pragma config FOSC = HS // Oscillator Selection bits (HS oscillator) #pragma config WDTE = OFF // Watchdog Timer Enable bit (WDT enabled) #pragma config PWRTE = OFF // Power-up Timer Enable bit (PWRT disabled) #pragma config BOREN = ON // Brown-out Reset Enable bit (BOR enabled) #pragma config LVP = OFF // Low-Voltage (Single-Supply) In-Circuit Serial Programming Enable bit (RB3 is digital I/O, HV on MCLR must be used for programming) #pragma config CPD = OFF // Data EEPROM Memory Code Protection bit (Data EEPROM code protection off) #pragma config WRT = OFF // Flash Program Memory Write Enable bits (Write protection off; all program memory may be written to by EECON control) #pragma config CP = OFF // Flash Program Memory Code Protection bit (Code protection off) //END CONFIG
Tiếp theo, chúng tôi xác định một số macro được sử dụng để khai báo chân cho LCD và các GPIO khác.
#define uchar unsigned char #define uint unsigned int #define LCDPORTDIR TRISA #define LCDPORT PORTA #define RS RE1 #define EN RE0 #define relay1dir TRISC0 #define relay2dir TRISC1 #define relay3dir TRISC2 #define relay4dir TRISC4 #define relay1 RC0 #define relay2 RC1 #define relay3 RC2 #define relay4 RC4 #define leddir TRISC3 #define led RC3 #define txDir TRISD0 #define tx RD0
Dưới đây là một số biến cần thiết cho dự án
volatile char buf[95]; uchar buf1[70]; uchar buf2[15]; int retry; int restartFlag=0; volatile char index=0; volatile char flag=0; volatile int msCount=0; volatile char g_timerflag=1; volatile int counter=0; volatile char sec=0; unsigned int topiclength; unsigned char topic[25]; unsigned char encodedByte; int X;
Hàm bên dưới được sử dụng để khởi tạo Wi-Fi, chịu trách nhiệm khởi tạo mô-đun wifi và kết nối ESP8266 với điểm phát sóng Wi-Fi hoặc bộ định tuyến Wi-Fi.
void espInitize()
{
lcdwrite(0x01, CMD);
lcdprint("ESP Initilizing");
serialprintln("AT+RST");
__delay_ms(5000);
espInit("AT","OK",2);
espInit("ATE1","OK",2);
espInit("AT+CWMODE=3","OK",2);
espInit("AT+CWQAP","OK",2);
espInit("AT+CWJAP=\"wifi_name\",\"password\"","OK",3);
serialprintln("AT+CIFSR");
serialFlush();
__delay_ms(500);
}
Code dưới đây được sử dụng để cấu hình MQTT và adafrut.io.
const char MQTTHost[] = "io.adafruit.com"; const char MQTTPort[] = "1883"; const char MQTTClientID[] = "ABCDEF"; const char MQTTTopicRelay1[] = "saddam4201/feeds/Light1"; const char MQTTTopicRelay2[] = "saddam4201/feeds/Light2"; const char MQTTTopicRelay3[] = "saddam4201/feeds/Light3"; const char MQTTTopicRelay4[] = "saddam4201/feeds/Light4"; const char MQTTProtocolName[] = "MQTT"; const char MQTTLVL = 0x03; const char MQTTFlags = 0xC2; const unsigned int MQTTKeepAlive = 60; const char MQTTUsername[] = "saddam4201"; // put your Username const char MQTTPassword[] = "xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx"; // Put Your Password const char MQTTQOS = 0x00; const char MQTTPacketID = 0x0001;
Hàm đã cho được sử dụng để kết nối với IO của Adafruit và đăng ký các chủ đề mà chúng tôi đã sử dụng trong dự án này.
void restartESP()
{
espInitize();
espInit("AT+CIPSTART=\"TCP\",\"io.adafruit.com\",1883","CONNECT",5)
SendConnectPacket()
SendSubscribePacket(&MQTTTopicRelay1[0],strlen(MQTTTopicRelay1))
SendSubscribePacket(&MQTTTopicRelay2[0],strlen(MQTTTopicRelay2))
SendSubscribePacket(&MQTTTopicRelay3[0],strlen(MQTTTopicRelay3))
lcdwrite(1,CMD);
led=1;
}
Hàm đã cho là để kết nối với Adafruit IO MQTT
int SendConnectPacket(void)
{
int txIndex=0;
unsigned int MQTTProtocolNameLength = strlen(MQTTProtocolName);
unsigned int MQTTClientIDLength = strlen(MQTTClientID);
unsigned int MQTTUsernameLength = strlen(MQTTUsername);
unsigned int MQTTPasswordLength = strlen(MQTTPassword);
X = MQTTProtocolNameLength + 2 + 4 + MQTTClientIDLength + 2 + MQTTUsernameLength + 2 + MQTTPasswordLength + 2;
do
{
encodedByte = X % 128;
X = X / 128;
if ( X > 0 )
{
encodedByte |= 128;
}
} while ( X > 0 );
buf1[txIndex++]=0x10;
buf1[txIndex++]=encodedByte;
buf1[txIndex++]=MQTTProtocolNameLength<<8;
buf1[txIndex++]=MQTTProtocolNameLength;
memcpy((unsigned char *)&buf1[txIndex],(unsigned char *)&MQTTProtocolName,MQTTProtocolNameLength);
Hàm đã cho được sử dụng để gửi gói đăng ký tới MQTT
int SendSubscribePacket(char topic[], int topiclength)
{
X = 2 + 2 + topiclength + 1;
do
{
encodedByte = X % 128;
X = X / 128;
if ( X > 0 )
{
encodedByte |= 128;
}
//serialwrite(encodedByte);
} while ( X > 0 );
int txIndex=0;
buf1[txIndex++]=0x82;
buf1[txIndex++]=encodedByte;
buf1[txIndex++]=MQTTPacketID<<8;
buf1[txIndex++]=MQTTPacketID;
buf1[txIndex++]=topiclength<<8;
buf1[txIndex++]=topiclength;
memcpy(&buf1[txIndex],(char *)&topic[0],topiclength);
txIndex+=topiclength;
Chúng tôi cũng có một số hàm liên quan đến giao tiếp LCD và Nối tiếp, xem code hoàn chỉnh được đưa ra dưới đây. Đồng thời kiểm tra Video hoạt động của dự án Tự động hóa ngôi nhà dựa trên PIC này.
Vì vậy, với việc sử dụng Adafruit.io, việc điều khiển các chân vi điều khiển từ mọi nơi trên thế giới bằng internet trở nên rất dễ dàng .
Code
#define _XTAL_FREQ 18432000
#include <xc.h>
#include<pic.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
// BEGIN CONFIG
#pragma config FOSC = HS // Oscillator Selection bits (HS oscillator)
#pragma config WDTE = OFF // Watchdog Timer Enable bit (WDT enabled)
#pragma config PWRTE = OFF // Power-up Timer Enable bit (PWRT disabled)
#pragma config BOREN = ON // Brown-out Reset Enable bit (BOR enabled)
#pragma config LVP = OFF // Low-Voltage (Single-Supply) In-Circuit Serial Programming Enable bit (RB3 is digital I/O, HV on MCLR must be used for programming)
#pragma config CPD = OFF // Data EEPROM Memory Code Protection bit (Data EEPROM code protection off)
#pragma config WRT = OFF // Flash Program Memory Write Enable bits (Write protection off; all program memory may be written to by EECON control)
#pragma config CP = OFF // Flash Program Memory Code Protection bit (Code protection off)
//END CONFIG
#define uchar unsigned char
#define uint unsigned int
#define LCDPORTDIR TRISA
#define LCDPORT PORTA
#define RS RE1
#define EN RE0
#define relay1dir TRISC0
#define relay2dir TRISC1
#define relay3dir TRISC2
#define relay4dir TRISC4
#define relay1 RC0
#define relay2 RC1
#define relay3 RC2
#define relay4 RC4
#define leddir TRISC3
#define led RC3
#define txDir TRISD0
#define tx RD0
#define HIGH 1
#define LOW 0
#define maxRetry 3
#define buflen 95
volatile char buf[95];
uchar buf1[70];
uchar buf2[15];
int retry;
int restartFlag=0;
volatile char index=0;
volatile char flag=0;
volatile int msCount=0;
volatile char g_timerflag=1;
volatile int counter=0;
volatile char sec=0;
unsigned int topiclength;
unsigned char topic[25];
unsigned char encodedByte;
int X;
const char MQTTHost[] = "io.adafruit.com";
const char MQTTPort[] = "1883";
const char MQTTClientID[] = "ABCDEF";
const char MQTTTopicRelay1[] = "saddam4201/feeds/Light1";
const char MQTTTopicRelay2[] = "saddam4201/feeds/Light2";
const char MQTTTopicRelay3[] = "saddam4201/feeds/Light3";
const char MQTTTopicRelay4[] = "saddam4201/feeds/Light4";
const char MQTTProtocolName[] = "MQTT";
const char MQTTLVL = 0x03;
const char MQTTFlags = 0xC2;
const unsigned int MQTTKeepAlive = 60;
const char MQTTUsername[] = "saddam4201"; // put your Username
const char MQTTPassword[] = "xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx"; // Put Your Password
const char MQTTQOS = 0x00;
const char MQTTPacketID = 0x0001;
#define netCheckSec 60
int initFlag=1;
enum
{
CMD,
DATA,
SBIT_CREN=4,
SBIT_TXEN,
SBIT_SPEN,
};
int SendConnectPacket(void);
int SendSubscribePacket(char topic[], int);
void lcdwrite(uchar ch,uchar rw)
{
LCDPORT= ch>>4 & 0x0F;
RS=rw;
EN=1;
__delay_ms(5);
EN=0;
LCDPORT= ch & 0x0F;
EN=1;
__delay_ms(5);
EN=0;
}
lcdprint(char *str)
{
while(*str)
{
lcdwrite(*str++,DATA);
//__delay_ms(20);
}
}
lcdbegin()
{
uchar lcdcmd[5]={0x02,0x28,0x0E,0x06,0x01};
uint i=0;
for(i=0;i<5;i++)
lcdwrite(lcdcmd[i], CMD);
}
void serialbegin(unsigned long baudrate)
{
TXSTAbits.BRGH = 1; //Setting High Baud Rate
SPBRG=(_XTAL_FREQ/(long)(16UL*baudrate))-1;
TXSTAbits.SYNC = 0; //Setting Asynchronous Mode, ie UART
RCSTAbits.SPEN = 1; //Enables Serial Port
TRISC7 = 1; //As Prescribed in Datasheet
TRISC6 = 0; //As Prescribed in Datasheet
RCSTAbits.CREN = 1; //Enables Continuous Reception
TXSTAbits.TXEN = 1; //Enables Transmission
//RCONbits.IPEN = 1; // ENABLE interrupt priority
GIE = 1; // ENABLE interrupts
INTCONbits.PEIE = 1; // ENable peripheral interrupts.
PIE1bits.RCIE = 1; // ENABLE USART receive interrupt
PIE1bits.TXIE = 0; // disable USART TX interrupt
// make sure the RX flag is clear
PIR1bits.RCIF = 0;
}
void serialwrite(char ch)
{
while(TXIF==0); // Wait till the transmitter register becomes empt
TXREG=ch; // load the char to be transmitted into transmit reg
TXIF=0; // Clear transmitter flag
__delay_ms(1);
}
serialprint(char *str)
{
while(*str)
{
serialwrite(*str++);
}
}
serialprintln(char *str)
{
while(*str)
{
serialwrite(*str++);
}
serialwrite(0x0D);
serialwrite(0x0A);
}
char UART_RxChar()
{
while(RCIF==0); // Wait till the data is received
RCIF=0;
uchar ch=RCREG;// Clear receiver flag
lcdwrite(ch, DATA);
return(ch); // Return the received data to calling function
}
void serialFlush()
{
for(int i=0;i<buflen;i++)
{
buf[i]=0;
}
index=0;
}
void write(char ch)
{
/* tx=0;
__delay_us(8);
for(int i=0;i<8;i++)
{
if(ch & 1)
tx=1;
else
tx=0;
__delay_us(8);
ch>>=1;
}
tx=1;
__delay_us(8); */
}
void Serialprintdebug(char *str)
{
while(*str)
{
write(*str);
str++;
}
}
void timer() // 10 -> 1us
{
OPTION_REG = (1<<2); // Timer0 with external freq and 32 as prescalar
TMR0=100; // Load the time value for 1ms delay
TMR0IE=1; //Enable timer interrupt bit in PIE1 register
GIE=1; //Enable Global Interrupt
PEIE=1; //Enable the Peripheral Interrupt
}
void timerOn(uint time)
{
msCount=time;
TMR0=99;
PEIE=1;
}
void timerOff()
{
PEIE=0;
}
void delay(unsigned int t)
{
for(int i=0;i<t;i++)
for(int j=0;j<1000;j++);
}
int espInit(char *cmd, char *res, int time)
{
retry=0;
while(1)
{
if(flag == 0)
serialFlush();
serialprintln(cmd);
long csec=sec;
while(sec < csec+time)
{
if(strstr(buf,res))
{
return 0;
}
__delay_ms(1000);
}
retry++;
if(retry>maxRetry)
{
return 1;
}
}
return 1;
}
void espInitize()
{
lcdwrite(0x01, CMD);
lcdprint("ESP Initilizing");
serialprintln("AT+RST");
__delay_ms(5000);
espInit("AT","OK",2);
espInit("ATE1","OK",2);
espInit("AT+CWMODE=3","OK",2);
espInit("AT+CWQAP","OK",2);
espInit("AT+CWJAP=\"wifi_name\",\"password\"","OK",3);
serialprintln("AT+CIFSR");
serialFlush();
__delay_ms(500);
}
void checkBuffer()
{
if(strstr(buf,"Light1ON"))
relay1=0;
else if(strstr(buf,"Light1OFF"))
relay1=1;
else if(strstr(buf,"Light2ON"))
relay2=0;
else if(strstr(buf,"Light2OFF"))
relay2=1;
else if(strstr(buf,"Light3ON"))
relay3=0;
else if(strstr(buf,"Light3OFF"))
relay3=1;
else if(strstr(buf,"Light4ON"))
relay4=0;
else if(strstr(buf,"Light4OFF"))
relay4=1;
serialFlush();
}
void restartESP()
{
espInitize();
espInit("AT+CIPSTART=\"TCP\",\"io.adafruit.com\",1883","CONNECT",5)
SendConnectPacket()
SendSubscribePacket(&MQTTTopicRelay1[0],strlen(MQTTTopicRelay1))
SendSubscribePacket(&MQTTTopicRelay2[0],strlen(MQTTTopicRelay2))
SendSubscribePacket(&MQTTTopicRelay3[0],strlen(MQTTTopicRelay3))
lcdwrite(1,CMD);
led=1;
}
int main()
{
ADCON1=0b00000110;
relay4dir= 0;
relay1dir= 0;
relay2dir= 0;
relay3dir= 0;
leddir=0;
LCDPORTDIR=0x00;
TRISE=0;
txDir=0;
lcdbegin();
lcdprint("Home Automation ");
lcdwrite(192,CMD);
lcdprint("Using PIC16F877A");
__delay_ms(2000);
//Serialprintdebug("Saddam Khan");
index=0;
serialbegin(115200);
timer();
timerOn(1000);
lcdwrite(1,CMD);
lcdprint("Please Wait...");
led=0;
restartESP();
while(1)
{
if(flag==1)
{
checkBuffer();
flag=0;
}
lcdwrite(0x80,CMD);
lcdprint("L1 L2 L3");
lcdwrite(192,CMD);
if(relay1)
lcdprint("OFF");
else
lcdprint("ON ");
lcdwrite(198,CMD);
if(relay2)
lcdprint("OFF");
else
lcdprint("ON ");
lcdwrite(204,CMD);
if(relay3)
lcdprint("OFF");
else
lcdprint("ON ");
__delay_ms(1000);
}
return 0;
}
void interrupt SerialRxPinInterrupt(void)
{
if((PIR1bits.RCIF == 1) && (PIE1bits.RCIE == 1))
{
uchar ch=RCREG;
if(ch != NULL)
{
buf[index]=ch;
if(index>=30)
flag=1;
index++;
if(index>=buflen)
index=0;
}
RCIF = 0; // clear rx flag
}
if(INTCONbits.TMR0IE && INTCONbits.TMR0IF)
{
TMR0IF=0;
TMR0=112;
counter++;
if(counter >= msCount)
{
sec++;
if(sec >= netCheckSec)
{
g_timerflag=1;
sec=0;
}
counter=0;
}
}
}
int SendConnectPacket(void)
{
int txIndex=0;
unsigned int MQTTProtocolNameLength = strlen(MQTTProtocolName);
unsigned int MQTTClientIDLength = strlen(MQTTClientID);
unsigned int MQTTUsernameLength = strlen(MQTTUsername);
unsigned int MQTTPasswordLength = strlen(MQTTPassword);
X = MQTTProtocolNameLength + 2 + 4 + MQTTClientIDLength + 2 + MQTTUsernameLength + 2 + MQTTPasswordLength + 2;
do
{
encodedByte = X % 128;
X = X / 128;
if ( X > 0 )
{
encodedByte |= 128;
}
} while ( X > 0 );
buf1[txIndex++]=0x10;
buf1[txIndex++]=encodedByte;
buf1[txIndex++]=MQTTProtocolNameLength<<8;
buf1[txIndex++]=MQTTProtocolNameLength;
memcpy((unsigned char *)&buf1[txIndex],(unsigned char *)&MQTTProtocolName,MQTTProtocolNameLength);
txIndex+=MQTTProtocolNameLength;
buf1[txIndex++]=MQTTLVL;
buf1[txIndex++]=MQTTFlags;
buf1[txIndex++]=MQTTKeepAlive<<8;
buf1[txIndex++]=MQTTKeepAlive;
buf1[txIndex++]=MQTTClientIDLength<<8;
buf1[txIndex++]=MQTTClientIDLength;
memcpy(&buf1[txIndex],(char *)&MQTTClientID,MQTTClientIDLength);
txIndex+=MQTTClientIDLength;
buf1[txIndex++]=MQTTUsernameLength<<8;
buf1[txIndex++]=MQTTUsernameLength;
memcpy(&buf1[txIndex],(char *)&MQTTUsername,MQTTUsernameLength);
txIndex+=MQTTUsernameLength;
buf1[txIndex++]=MQTTPasswordLength<<8;
buf1[txIndex++]=MQTTPasswordLength;
memcpy(&buf1[txIndex],(char *)&MQTTPassword,MQTTPasswordLength);
txIndex+= MQTTPasswordLength;
serialFlush();
sprintf(buf2,"AT+CIPSEND=%d",txIndex);
serialprintln(buf2);
__delay_ms(1000);
serialFlush();
for(int i=0;i<txIndex;i++)
serialwrite(buf1[i]);
serialwrite(0x1A);
__delay_ms(2000);
}
int SendSubscribePacket(char topic[], int topiclength)
{
X = 2 + 2 + topiclength + 1;
do
{
encodedByte = X % 128;
X = X / 128;
if ( X > 0 )
{
encodedByte |= 128;
}
//serialwrite(encodedByte);
} while ( X > 0 );
int txIndex=0;
buf1[txIndex++]=0x82;
buf1[txIndex++]=encodedByte;
buf1[txIndex++]=MQTTPacketID<<8;
buf1[txIndex++]=MQTTPacketID;
buf1[txIndex++]=topiclength<<8;
buf1[txIndex++]=topiclength;
memcpy(&buf1[txIndex],(char *)&topic[0],topiclength);
txIndex+=topiclength;
buf1[txIndex++]=MQTTQOS;
serialFlush();
sprintf(buf2,"AT+CIPSEND=%d",txIndex);
serialprintln(buf2);
__delay_ms(1000);
serialFlush();
for(int i=0;i<txIndex;i++)
serialwrite(buf1[i]);
serialwrite(0x1A);
__delay_ms(2000);
}
Video