
Công nghệ quét mẫu Scan3D là gì
Quét 3D là quá trình phân tích một đối tượng hoặc môi trường trong thế giới thực để thu thập dữ liệu về hình dạng của nó và có thể là cả đặc điểm của nó (ví dụ: màu sắc). Dữ liệu được thu thập sau đó có thể được sử dụng để xây dựng các mô hình 3D kỹ thuật số.
Một máy quét 3D có thể dựa trên nhiều công nghệ khác nhau, mỗi công nghệ có những hạn chế, ưu điểm và chi phí riêng. Nhiều hạn chế trong các loại đối tượng có thể được số hóa vẫn còn tồn tại. ví dụ, công nghệ quang học có thể gặp nhiều khó khăn với các vật thể sáng bóng, phản chiếu hoặc trong suốt. Ví dụ, quét chụp cắt lớp điện toán công nghiệp và máy quét 3D ánh sáng có cấu trúc có thể được sử dụng để xây dựng các mô hình 3D kỹ thuật số mà không cần thử nghiệm phá hủy.
Dữ liệu 3D được thu thập hữu ích cho nhiều ứng dụng. Những thiết bị này được sử dụng rộng rãi bởi ngành công nghiệp giải trí trong sản xuất phim và trò chơi video, bao gồm cả thực tế ảo. Các ứng dụng phổ biến khác của công nghệ này bao gồm thực tế tăng cường, chụp chuyển động, nhận dạng cử chỉ, thiết kế công nghiệp, chỉnh hình và chân tay giả, thiết kế ngược và tạo mẫu, kiểm soát / kiểm tra chất lượng và số hóa các kiệt tác văn hóa
Chức năng

Quét 3D bộ xương cá voi vây trong Bảo tàng Lịch sử Tự nhiên của Slovenia (tháng 8 năm 2013)
Mục đích của máy quét 3D thường là tạo ra một mô hình 3D. Mô hình 3D này bao gồm một đám mây điểm của các mẫu hình học trên bề mặt của đối tượng. Những điểm này sau đó có thể được sử dụng để ngoại suy hình dạng của đối tượng (một quá trình được gọi là tái kết cấu). Nếu thông tin màu được thu thập tại mỗi điểm, thì màu sắc trên bề mặt của đối tượng cũng có thể được xác định.
Máy quét 3D chia sẻ một số đặc điểm với máy ảnh. Giống như hầu hết các máy ảnh, chúng có trường nhìn giống hình nón và giống như camera, chúng chỉ có thể thu thập thông tin về các bề mặt không bị che khuất. Mặc dù máy ảnh thu thập thông tin màu về các bề mặt trong trường nhìn của nó, máy quét 3D thu thập thông tin khoảng cách về các bề mặt trong trường nhìn của nó. “Hình ảnh” được tạo bởi máy quét 3D mô tả khoảng cách đến một bề mặt tại mỗi điểm trong ảnh. Điều này cho phép xác định vị trí ba chiều của từng điểm trong ảnh.
Trong hầu hết các trường hợp, một lần quét sẽ không tạo ra một mô hình hoàn chỉnh của đối tượng. Nhiều lần quét, thậm chí hàng trăm, từ nhiều hướng khác nhau thường được yêu cầu để có được thông tin về tất cả các khía cạnh của chủ đề. Các bản quét này phải được đưa vào một hệ thống tham chiếu chung, một quy trình thường được gọi là căn chỉnh, sau đó được hợp nhất để tạo ra một mô hình 3D hoàn chỉnh. Toàn bộ quá trình này, đi từ bản đồ phạm vi đơn đến toàn bộ mô hình, thường được gọi là giải đồ quét 3D.
Công nghệ
Có nhiều công nghệ để thu được hình dạng của vật thể 3D. Một phân loại được thiết lập tốt chia chúng thành hai loại: tiếp xúc và không tiếp xúc. Các giải pháp không tiếp xúc có thể được chia thành hai loại chính, chủ động và thụ động.
Tiếp xúc

Một máy đo tọa độ với cánh tay vuông góc cứng vững.
Máy quét 3D tiếp xúc thăm dò đối tượng thông qua cảm ứng vật lý, trong khi đối tượng tiếp xúc hoặc nằm trên một tấm bề mặt phẳng chính xác, tiếp xúc và dò theo độ nhám bề mặt. Trong trường hợp đối tượng được quét không bằng phẳng hoặc không thể nằm ổn định trên một bề mặt phẳng, nó được hỗ trợ và giữ chắc chắn tại chỗ bằng đồ gá.
Cơ chế quét có thể có ba dạng khác nhau:
Một hệ thống bàn trượt với cánh tay cứng vững giữ chặt luôn vuông góc và mỗi trục trượt dọc theo một đường ray. Các hệ thống như vậy hoạt động tốt nhất với hình dạng biên dạng phẳng hoặc bề mặt cong lồi đơn giản.
Một cánh tay khớp nối với khung cứng và cảm biến góc chính xác cao. Vị trí của đầu cánh tay liên quan đến toán học phức tạp tính toán góc xoay cổ tay và góc bản lề của mỗi khớp. Điều này là lý tưởng để thăm dò vào các kẽ hở và không gian bên trong .
Một sự kết hợp của cả hai phương pháp có thể được sử dụng, chẳng hạn như một cánh tay khớp nối được treo trên một bàn di động, để ánh xạ các vật thể lớn với các hốc bên trong hoặc các bề mặt chồng chéo.
CMM (máy đo tọa độ) là một ví dụ về máy quét 3D tiếp xúc. Nó được sử dụng chủ yếu trong sản xuất và rất chính xác. Tuy nhiên, nhược điểm của CMM là nó yêu cầu tiếp xúc với đối tượng được quét. Do đó, hành động quét đối tượng có thể làm sai lệch hoặc làm hỏng nó. Thực tế này rất có ý nghĩa khi quét các vật thể tinh tế hoặc có giá trị như các cổ vật lịch sử. Nhược điểm khác của CMM là chúng tương đối chậm so với các phương pháp quét khác. Di chuyển vật lý của cánh tay mà đầu dò được gắn vào có thể rất chậm và các CMM nhanh nhất chỉ có thể hoạt động trên vài trăm hertz. Ngược lại, một hệ thống quang học như máy quét laser có thể hoạt động từ 10 đến 500 kHz.
Các ví dụ khác là các đầu dò cảm ứng điều khiển bằng tay được sử dụng để số hóa các mô hình đất sét trong ngành công nghiệp hoạt hình máy tính.
Không tiếp xúc
Máy quét hoạt động phát ra một số loại bức xạ hoặc ánh sáng và phát hiện sự phản xạ hoặc bức xạ của nó đi qua vật thể để thăm dò một vật thể hoặc môi trường. Các nguồn phát có thể được sử dụng bao gồm ánh sáng, siêu âm hoặc x-quang.
Thời gian hồi tiếp
Máy quét 3d này có thể được sử dụng để quét các tòa nhà, tường đá, v.v., để tạo ra mô hình 3D. Các máy có thể chiếu chùm tia laser của nó trong một phạm vi rộng: đầu của nó xoay theo chiều ngang, một chiếc gương lật theo chiều dọc. Chùm tia laser được sử dụng để đo khoảng cách đến vật thể đầu tiên trên đường đi của nó.

Máy quét laser 3D hồi tiếp sử dụng ánh sáng laser để thăm dò đối tượng. Trung tâm của loại máy quét này là công cụ tìm phạm vi laser thời gian hồi tiếp. Công cụ tìm phạm vi laser theo khoảng cách của một bề mặt bằng cách xác định thời gian phản xạ lại của một xung ánh sáng. Một tia laser được sử dụng để phát ra xung ánh sáng và lượng thời gian trước khi ánh sáng phản xạ được nhìn thấy bằng máy dò được đo. Vì tốc độ ánh sáng {\ displaystyle c} c đã biết, thời gian khứ hồi xác định khoảng cách di chuyển của ánh sáng, gấp đôi khoảng cách giữa máy quét và bề mặt. Nếu t là thời gian hồi tiếp, thì khoảng cách bằng. Độ chính xác của máy quét laser 3D thời gian bay phụ thuộc vào cách chúng ta có thể đo chính xác là thời gian để ánh sáng truyền đi 1 milimet.
Công cụ tìm phạm vi laser chỉ phát hiện khoảng cách của một điểm theo hướng nhìn của nó. Do đó, máy quét sẽ quét toàn bộ trường nhìn của nó tại một thời điểm bằng cách thay đổi hướng quan sát của trình tìm phạm vi để quét các điểm khác nhau. Hướng nhìn của công cụ tìm phạm vi laser có thể được thay đổi bằng cách xoay chính công cụ tìm phạm vi hoặc bằng cách sử dụng hệ thống gương xoay. Phương pháp thứ hai thường được sử dụng vì gương nhẹ hơn nhiều và do đó có thể được quay nhanh hơn nhiều và với độ chính xác cao hơn. Máy quét laser 3D hồi tiếp thông thường có thể đo khoảng cách 10.000 ~ 100.000 điểm mỗi giây.
Tam giác
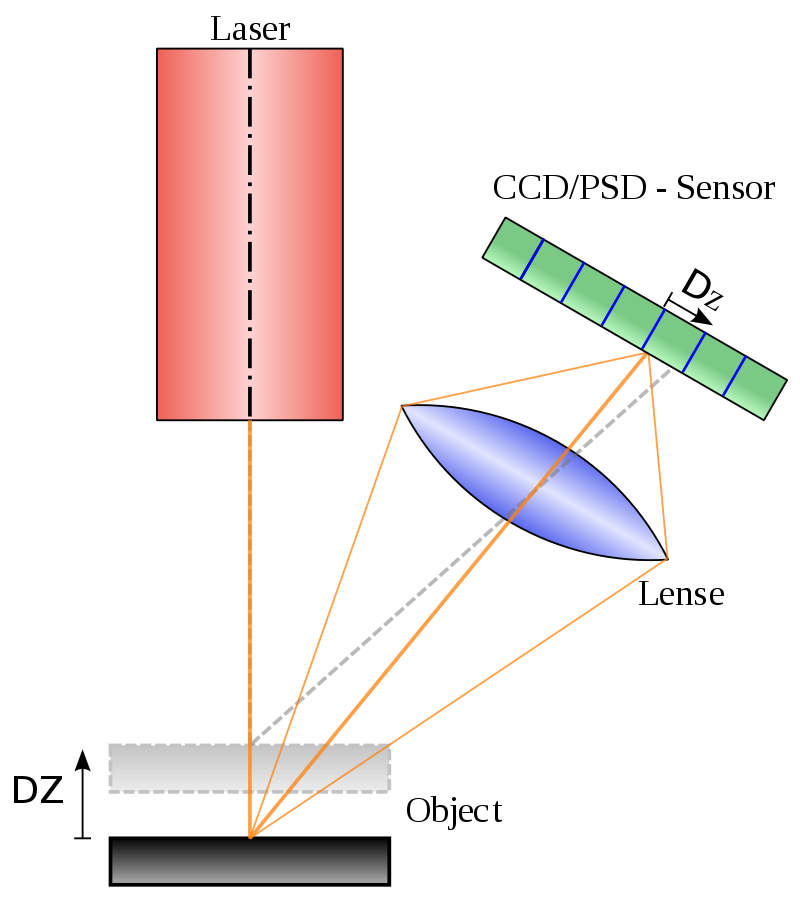
Nguyên lý của một cảm biến tam giác laser. Hai vị trí đối tượng được hiển thị.
Máy quét laser 3D dựa trên tam giác cũng là máy quét hoạt động sử dụng ánh sáng laser để thăm dò môi trường. Đối với máy quét laser 3D hồi tiếp, tia laser tam giác chiếu tia laser vào đối tượng và khai thác máy ảnh để tìm vị trí của điểm laser. Tùy thuộc vào khoảng cách của tia laser chiếu vào bề mặt, điểm laser xuất hiện ở những vị trí khác nhau trong trường nhìn của máy ảnh. Kỹ thuật này được gọi là tam giác vì các chấm laser, máy ảnh và bộ phát laser tạo thành một hình tam giác. Độ dài của một cạnh của tam giác, khoảng cách giữa máy ảnh và bộ phát laser được biết đến. Góc của góc phát laser cũng được biết đến. Góc của góc camera có thể được xác định bằng cách nhìn vào vị trí của chấm laser trong trường nhìn của camera. Ba thông tin này xác định đầy đủ hình dạng và kích thước của hình tam giác và đưa ra vị trí của góc chấm laser của hình tam giác. Trong hầu hết các trường hợp, một dải laser, thay vì một chấm laser đơn lẻ, được quét ngang qua vật thể để tăng tốc quá trình thu nhận. Hội đồng nghiên cứu quốc gia Canada là một trong những viện đầu tiên phát triển công nghệ quét laser dựa trên tam giác vào năm 1978.
Điểm mạnh và điểm yếu
Mỗi công cụ tìm phạm vi hồi tiếp và tam giác đều có điểm mạnh và điểm yếu khiến chúng phù hợp với các trường hợp khác nhau. Ưu điểm của công cụ tìm phạm vi thời gian bay là chúng có khả năng hoạt động trên một khoảng cách rất dài, theo thứ tự hàng km. Do đó, các máy quét này phù hợp để quét các cấu trúc lớn như các tòa nhà hoặc các đặc điểm địa lý. Nhược điểm của công cụ tìm phạm vi thời gian bay là độ chính xác của chúng. Do tốc độ ánh sáng cao, thời gian của chuyến đi khứ hồi rất khó khăn và độ chính xác của phép đo khoảng cách tương đối thấp, theo thứ tự milimet.
Công cụ tìm phạm vi tam giác hoàn toàn ngược lại. Chúng có phạm vi giới hạn vài mét, nhưng độ chính xác của chúng tương đối cao. Độ chính xác của các công cụ tìm phạm vi tam giác là trên hàng chục micromet.
Độ chính xác của máy quét thời gian có thể bị mất khi tia laser chạm vào cạnh của vật thể vì thông tin được gửi lại cho máy quét là từ hai vị trí khác nhau cho một xung laser. Tọa độ liên quan đến vị trí của máy quét cho một điểm chạm vào cạnh của một đối tượng sẽ được tính dựa trên mức trung bình và do đó sẽ đặt điểm đó ở sai vị trí. Khi sử dụng quét độ phân giải cao trên một đối tượng, khả năng chùm tia chạm vào một cạnh sẽ tăng lên và dữ liệu kết quả sẽ hiển thị nhiễu ngay sau các cạnh của đối tượng. Máy quét wit h chiều rộng chùm tia nhỏ hơn sẽ giúp giải quyết vấn đề này nhưng sẽ bị giới hạn bởi phạm vi vì chiều rộng chùm tia sẽ tăng theo khoảng cách. Phần mềm cũng có thể giúp đỡ bằng cách xác định rằng vật thể đầu tiên bị tia laser chiếu vào sẽ hủy bỏ thứ hai.
Với tốc độ 10.000 điểm mẫu mỗi giây, quét độ phân giải thấp có thể mất ít hơn một giây, nhưng quét độ phân giải cao, yêu cầu hàng triệu mẫu, có thể mất vài phút cho một số máy quét thời gian bay. Vấn đề này tạo ra là sự biến dạng từ chuyển động. Vì mỗi điểm được lấy mẫu tại một thời điểm khác nhau, bất kỳ chuyển động nào trong đối tượng hoặc máy quét sẽ làm biến dạng dữ liệu được thu thập. Vì vậy, thường là cần thiết để gắn cả đối tượng và máy quét trên nền tảng ổn định và giảm thiểu rung động. Sử dụng các máy quét này để quét các đối tượng chuyển động là rất khó khăn.
Gần đây, đã có nghiên cứu về việc bù cho sự biến dạng từ một lượng nhỏ rung động và biến dạng do chuyển động và / hoặc xoay.
Khi quét ở một vị trí trong bất kỳ khoảng thời gian nào, chuyển động nhẹ có thể xảy ra ở vị trí máy quét do thay đổi nhiệt độ. Nếu máy quét được đặt trên giá ba chân và có ánh sáng mặt trời mạnh ở một bên của máy quét thì bên đó của chân máy sẽ mở rộng và từ từ làm biến dạng dữ liệu quét từ bên này sang bên khác. Một số máy quét laser có bộ bù mức được tích hợp trong chúng để chống lại mọi chuyển động của máy quét trong quá trình quét.
Hình ba chiều
Trong một hệ thống hình nón, một chùm tia laser được chiếu lên bề mặt và sau đó sự phản xạ tức thời dọc theo cùng một đường tia được đưa qua một tinh thể hình nón và chiếu lên một bộ cảm biến. Kết quả là một mẫu nhiễu xạ, có thể được phân tích tần số để xác định khoảng cách đến bề mặt đo. Ưu điểm chính của hình ba chiều bằng hình ảnh là chỉ cần một đường tia duy nhất để đo, do đó tạo cơ hội để đo ví dụ độ sâu của lỗ khoan mịn.
Máy quét laser cầm tay
Máy quét laser cầm tay tạo ra hình ảnh 3D thông qua cơ chế tam giác được mô tả ở trên: một chấm hoặc vạch laser được chiếu lên một vật thể từ thiết bị cầm tay và cảm biến (thường là thiết bị ghép điện tích hoặc thiết bị nhạy cảm vị trí) đo khoảng cách Lên bề mặt. Dữ liệu được thu thập liên quan đến một hệ tọa độ bên trong và do đó để thu thập dữ liệu trong đó máy quét đang chuyển động, phải xác định vị trí của máy quét. Vị trí có thể được xác định bởi máy quét sử dụng các tính năng tham chiếu trên bề mặt được quét (thường là các tab phản chiếu dính, nhưng các tính năng tự nhiên cũng đã được sử dụng trong công việc nghiên cứu) [10] [11] hoặc bằng phương pháp theo dõi bên ngoài. Theo dõi bên ngoài thường có dạng máy theo dõi laser (để cung cấp vị trí cảm biến) với camera tích hợp (để xác định hướng của máy quét) hoặc giải pháp chụp ảnh bằng cách sử dụng 3 camera trở lên cung cấp sáu bậc tự do của máy quét. Cả hai kỹ thuật đều có xu hướng sử dụng các điốt phát sáng màu đỏ được gắn vào máy quét mà máy ảnh nhìn thấy thông qua các bộ lọc cung cấp khả năng phục hồi cho ánh sáng xung quanh.
Dữ liệu được thu thập bởi máy tính và được ghi lại dưới dạng các điểm dữ liệu trong không gian ba chiều, với việc xử lý này có thể được chuyển đổi thành lưới tam giác và sau đó là mô hình thiết kế có sự trợ giúp của máy tính, thường là các bề mặt B-spline hợp lý không đồng nhất. Máy quét laser cầm tay có thể kết hợp dữ liệu này với các cảm biến ánh sáng thụ động, có thể nhìn thấy – kết cấu bề mặt và màu sắc – để xây dựng (hoặc “kỹ sư đảo ngược”) một mô hình 3D đầy đủ.
Ánh sáng cấu trúc
Bài chi tiết: Máy quét 3D có cấu trúc ánh sáng
Máy quét 3D có cấu trúc ánh sáng chiếu một mô hình ánh sáng vào đối tượng và xem xét sự biến dạng của mô hình trên đối tượng. Mẫu được chiếu lên đối tượng bằng máy chiếu LCD hoặc nguồn sáng ổn định khác. Một máy ảnh, hơi lệch so với máy chiếu mẫu, nhìn vào hình dạng của mẫu và tính toán khoảng cách của mọi điểm trong trường nhìn.
Quét ánh sáng có cấu trúc vẫn là một lĩnh vực nghiên cứu rất tích cực với nhiều tài liệu nghiên cứu được công bố mỗi năm. Bản đồ hoàn hảo cũng đã được chứng minh là hữu ích vì các mẫu ánh sáng có cấu trúc giải quyết vấn đề tương ứng và cho phép phát hiện lỗi và sửa lỗi. [24] [Xem Morano, R., et al. “Ánh sáng có cấu trúc sử dụng mã giả ngẫu nhiên”, Giao dịch của IEEE về phân tích mẫu và trí thông minh máy.
Ưu điểm của máy quét 3D có cấu trúc ánh sáng là tốc độ và độ chính xác. Thay vì quét từng điểm một, máy quét ánh sáng có cấu trúc quét nhiều điểm hoặc toàn bộ trường nhìn cùng một lúc. Quét toàn bộ trường nhìn trong một phần của giây sẽ làm giảm hoặc loại bỏ vấn đề biến dạng khỏi chuyển động. Một số hệ thống hiện có khả năng quét các đối tượng chuyển động trong thời gian thực. VisionMaster tạo ra một hệ thống quét 3D với camera 5 megapixel – 5 triệu điểm dữ liệu được thu thập trong mỗi khung hình.
Một máy quét thời gian thực sử dụng kỹ thuật trình chiếu rìa kỹ thuật số và chuyển pha (một số loại nhất định của các phương pháp ánh sáng có cấu trúc) đã được phát triển, để chụp, tái tạo và hiển thị các chi tiết mật độ cao của các vật thể biến dạng động (như biểu cảm khuôn mặt) với tốc độ 40 khung hình mỗi giây. [12] Gần đây, một máy quét khác đã được phát triển. Các mẫu khác nhau có thể được áp dụng cho hệ thống này và tốc độ khung hình để chụp và xử lý dữ liệu đạt được 120 khung hình mỗi giây. Nó cũng có thể quét các bề mặt bị cô lập, ví dụ hai bàn tay đang di chuyển. [13] Bằng cách sử dụng kỹ thuật làm mờ nhị phân, các bước đột phá tốc độ đã được thực hiện có thể đạt tới hàng trăm [14] đến hàng nghìn khung hình mỗi giây. [15]
Ánh sáng điều biến
Máy quét 3D ánh sáng được điều chế chiếu ánh sáng liên tục thay đổi vào đối tượng. Thông thường nguồn sáng chỉ đơn giản là quay vòng biên độ của nó theo mô hình hình sin. Một camera phát hiện ánh sáng phản xạ và lượng mẫu được dịch chuyển bằng cách xác định khoảng cách ánh sáng đi được. Ánh sáng điều biến cũng cho phép máy quét bỏ qua ánh sáng từ các nguồn khác ngoài laser, do đó không có nhiễu.
Kỹ thuật thể tích
Y khoa
Chụp cắt lớp vi tính (CT) là một phương pháp hình ảnh y tế tạo ra hình ảnh ba chiều của bên trong vật thể từ một loạt hình ảnh X quang hai chiều lớn, tương tự hình ảnh cộng hưởng từ là một kỹ thuật hình ảnh y tế khác cung cấp độ tương phản lớn hơn nhiều giữa các mô mềm khác nhau của cơ thể so với chụp cắt lớp vi tính (CT), làm cho nó đặc biệt hữu ích trong chẩn đoán thần kinh (não), cơ xương khớp, tim mạch và ung thư (ung thư). Những kỹ thuật này tạo ra một biểu diễn thể tích 3D riêng biệt có thể được trực quan hóa, thao tác hoặc chuyển đổi sang bề mặt 3D truyền thống bằng các thuật toán trích xuất isosurface.
Công nghiệp
Mặc dù phổ biến nhất trong y học, Chụp cắt lớp điện toán công nghiệp, Microtomography và MRI cũng được sử dụng trong các lĩnh vực khác để có được một đại diện kỹ thuật số của một vật thể và bên trong nó, như thử nghiệm vật liệu không phá hủy, thiết kế ngược, hoặc nghiên cứu các mẫu vật sinh học và cổ sinh vật học.
Không thụ động
Các giải pháp hình ảnh 3D thụ động không tự phát ra bất kỳ loại bức xạ nào, mà thay vào đó dựa vào việc phát hiện bức xạ xung quanh phản xạ. Hầu hết các giải pháp loại này phát hiện ánh sáng khả kiến vì đây là bức xạ xung quanh có sẵn. Các loại bức xạ khác, chẳng hạn như hồng ngoại cũng có thể được sử dụng. Phương pháp thụ động có thể rất rẻ, vì trong hầu hết các trường hợp, chúng không cần phần cứng cụ thể mà là máy ảnh kỹ thuật số đơn giản.
Các hệ thống lập thể thường sử dụng hai máy quay video, cách nhau một chút, nhìn vào cùng một cảnh. Bằng cách phân tích sự khác biệt nhỏ giữa các hình ảnh được nhìn thấy bởi mỗi camera, có thể xác định khoảng cách tại mỗi điểm trong ảnh. Phương pháp này dựa trên cùng các nguyên tắc thúc đẩy tầm nhìn lập thể của con người [1].
Hệ thống trắc quang thường sử dụng một camera, nhưng chụp nhiều ảnh trong các điều kiện ánh sáng khác nhau. Những kỹ thuật này cố gắng đảo ngược mô hình hình ảnh để phục hồi hướng bề mặt ở mỗi pixel.
Các kỹ thuật hình bóng sử dụng các phác thảo được tạo ra từ một chuỗi các bức ảnh xung quanh một vật thể ba chiều trên nền tương phản tốt. Các bóng này được ép đùn và giao nhau để tạo thành xấp xỉ thân tàu trực quan của vật thể. Với những cách tiếp cận này, một số điểm chung của một vật thể (như bên trong một cái bát) không thể được phát hiện.
Người dùng hỗ trợ (mô hình hóa dựa trên hình ảnh)
Có các phương pháp khác, dựa trên việc người dùng hỗ trợ phát hiện và nhận dạng một số tính năng và hình dạng trên một tập hợp các hình ảnh khác nhau của một đối tượng có thể tự xây dựng một xấp xỉ của chính đối tượng. Loại kỹ thuật này rất hữu ích để xây dựng xấp xỉ nhanh các vật thể có hình dạng đơn giản như các tòa nhà. Các gói thương mại khác nhau có sẵn như D-Sculptor, iModeller, Autodesk ImageModeler, 123DCatch hoặc PhotoModeler.
Loại giải pháp hình ảnh 3D này dựa trên các nguyên tắc của quang ảnh. Phương pháp này cũng hơi giống với phương pháp chụp ảnh toàn cảnh, ngoại trừ việc các bức ảnh được chụp một đối tượng trên không gian ba chiều để sao chép nó thay vì chụp một loạt ảnh từ một điểm trong không gian ba chiều để Nhân rộng môi trường xung quanh.
Tái tạo
Từ những đám mây điểm
Các đám mây điểm được tạo bởi máy quét 3D và hình ảnh 3D có thể được sử dụng trực tiếp để đo lường và trực quan hóa trong thế giới kiến trúc và xây dựng.
Từ mô hình
Tuy nhiên, hầu hết các ứng dụng sử dụng mô hình 3D đa giác, mô hình bề mặt NURBS hoặc mô hình CAD dựa trên tính năng có thể chỉnh sửa (còn gọi là mô hình Solid).
Các mô hình lưới đa giác: Trong một biểu diễn đa giác của một hình dạng, một bề mặt cong được mô hình hóa như nhiều bề mặt phẳng nhỏ (nghĩ về một hình cầu được mô phỏng như một quả bóng sàn nhảy). Các mô hình đa giác, còn được gọi là các mô hình lưới, rất hữu ích cho trực quan hóa, đối với một số CAM (nghĩa là gia công), nhưng nói chung ly “nặng” (tức là, tập dữ liệu rất lớn) và tương đối không thể chỉnh sửa trong biểu mẫu này. Tái thiết cho mô hình đa giác liên quan đến việc tìm và kết nối các điểm liền kề với các đường thẳng để tạo ra một bề mặt liên tục. Nhiều ứng dụng, cả miễn phí và không miễn phí, đều có sẵn cho mục đích này (ví dụ: MeshLab, PointCab, kubit PointCloud cho AutoCAD, Trình tái tạo 3D của JRC, hình ảnh tưởng tượng, PolyWorks, Rapidform, Geomagic, Imageware, Rhino 3D, v.v.).
Mô hình bề mặt: Mức độ tinh vi tiếp theo trong mô hình hóa bao gồm sử dụng một miếng vá các bề mặt cong để mô hình hóa hình dạng. Đây có thể là NURBS, TSplines hoặc các biểu diễn cong khác của cấu trúc liên kết cong. Sử dụng NURBS, hình dạng hình cầu trở thành một hình cầu toán học thực sự. Một số ứng dụng cung cấp bố cục vá bằng tay nhưng tốt nhất trong lớp cung cấp cả bố cục vá tự động và bố trí thủ công. Những miếng vá này có ưu điểm là nhẹ hơn và dễ thao tác hơn khi xuất sang CAD. Các mô hình bề mặt có phần có thể chỉnh sửa, nhưng chỉ trong một ý nghĩa điêu khắc của đẩy và kéo để làm biến dạng bề mặt. Đại diện này cho vay chính nó để mô hình hóa các hình dạng hữu cơ và nghệ thuật. Các nhà cung cấp bộ điều biến bề mặt bao gồm Rapidform, Geomagic, Rhino 3D, Maya, T Splines, v.v.
Các mô hình CAD rắn: Từ góc độ kỹ thuật / sản xuất, đại diện cuối cùng của hình dạng số hóa là mô hình CAD tham số có thể chỉnh sửa. Trong CAD, hình cầu được mô tả bằng các tính năng tham số dễ dàng được chỉnh sửa bằng cách thay đổi một giá trị (ví dụ: điểm trung tâm và bán kính).
Các mô hình CAD này mô tả không chỉ đơn giản là đường bao hoặc hình dạng của đối tượng, mà các mô hình CAD cũng thể hiện “ý đồ thiết kế” (nghĩa là, các tính năng quan trọng và mối quan hệ của chúng với các tính năng khác). Một ví dụ về ý định thiết kế không rõ ràng trong hình dạng một mình có thể là bu lông chốt của trống phanh, phải đồng tâm với lỗ ở giữa trống. Kiến thức này sẽ thúc đẩy trình tự và phương pháp tạo mô hình CAD; một nhà thiết kế có nhận thức về mối quan hệ này sẽ không thiết kế các bu lông lug được tham chiếu đến đường kính bên ngoài, mà thay vào đó, đến trung tâm. Một người lập mô hình tạo ra một mô hình CAD sẽ muốn bao gồm cả Hình dạng và ý định thiết kế trong mô hình CAD hoàn chỉnh.
Các nhà cung cấp cung cấp các cách tiếp cận khác nhau để có được mô hình CAD tham số. Một số xuất các bề mặt NURBS và để lại cho nhà thiết kế CAD để hoàn thành mô hình bằng CAD (ví dụ: Geomagic, Imageware, Rhino 3D). Những người khác sử dụng dữ liệu quét để tạo một mô hình dựa trên tính năng có thể chỉnh sửa và có thể kiểm chứng được nhập vào CAD với toàn bộ cây tính năng, mang lại một mô hình CAD nguyên gốc, hoàn chỉnh, nắm bắt cả hình dạng và ý định thiết kế (ví dụ: Geomagic, Rapidform). Tuy nhiên, các ứng dụng CAD khác đủ mạnh để thao tác các điểm hoặc mô hình đa giác bị giới hạn trong môi trường CAD (ví dụ: CATIA, AutoCAD, Revit).
Từ một tập hợp các lớp cắt 2D
Tái tạo 3D của não và nhãn cầu từ hình ảnh DICOM quét CT. Trong hình ảnh này, các khu vực có mật độ xương hoặc không khí được làm trong suốt và các lát cắt xếp chồng lên nhau trong một căn chỉnh không gian trống gần đúng. Vòng ngoài của vật liệu xung quanh não là các mô mềm của da và cơ ở bên ngoài hộp sọ. Một hộp đen bao quanh các lát để cung cấp nền đen. Vì đây chỉ là những hình ảnh 2D được xếp chồng lên nhau, khi nhìn vào cạnh, các lát cắt biến mất vì chúng có độ dày bằng không. Mỗi lần quét DICOM đại diện cho khoảng 5 mm vật liệu trung bình thành một lát mỏng.
Máy quét CT, CT công nghiệp, MRI hoặc Micro-CT không tạo ra các đám mây điểm mà là một tập hợp các lát 2D (mỗi lát được gọi là “tomogram”) sau đó được xếp chồng lên nhau để tạo ra hình đại diện 3D. Có một số cách để làm điều này tùy thuộc vào đầu ra cần thiết:
Kết xuất khối: Các phần khác nhau của một đối tượng thường có các giá trị ngưỡng hoặc mật độ thang khác nhau. Từ đó, một mô hình 3 chiều có thể được xây dựng và hiển thị trên màn hình. Nhiều mô hình có thể được xây dựng từ các ngưỡng khác nhau, cho phép các màu khác nhau đại diện cho từng thành phần của đối tượng. Kết xuất khối thường chỉ được sử dụng để trực quan hóa đối tượng được quét.
Phân đoạn hình ảnh: Khi các cấu trúc khác nhau có các giá trị ngưỡng / thang độ xám tương tự nhau, có thể tách chúng ra một cách đơn giản bằng cách điều chỉnh các tham số kết xuất khối. Giải pháp được gọi là phân đoạn, một thủ tục thủ công hoặc tự động có thể loại bỏ các cấu trúc không mong muốn khỏi hình ảnh. Phần mềm phân đoạn hình ảnh thường cho phép xuất các cấu trúc được phân đoạn ở định dạng CAD hoặc STL để thao tác thêm.
Chia lưới dựa trên hình ảnh: Khi sử dụng dữ liệu hình ảnh 3D để phân tích tính toán (ví dụ: CFD và FEA), chỉ cần phân đoạn dữ liệu và chia lưới từ CAD có thể trở nên tốn thời gian và hầu như không thể điều chỉnh được đối với các cấu trúc liên kết phức tạp của dữ liệu hình ảnh. Giải pháp này được gọi là chia lưới dựa trên hình ảnh, một quá trình tự động tạo ra một mô tả hình học chính xác và thực tế của dữ liệu quét.
Từ quét laser
Quét laser mô tả phương pháp chung để lấy mẫu hoặc quét bề mặt bằng cách sử dụng công nghệ laser. Một số lĩnh vực ứng dụng tồn tại chủ yếu khác nhau về công suất của laser được sử dụng và trong kết quả của quá trình quét. Công suất laser thấp được sử dụng khi bề mặt được quét không bị ảnh hưởng, ví dụ: khi nó chỉ phải được số hóa. Quét laser đồng tâm hoặc 3D là phương pháp để có được thông tin về bề mặt được quét. Một ứng dụng năng lượng thấp khác sử dụng các hệ thống chiếu ánh sáng có cấu trúc cho phép đo độ phẳng của pin mặt trời , cho phép tính toán ứng suất trong suốt hơn 2000 tấm mỗi giờ.
Công suất laser được sử dụng cho thiết bị quét laser trong các ứng dụng công nghiệp thường dưới 1W. Mức công suất thường ở mức 200 mW trở xuống nhưng đôi khi nhiều hơn.